
Roboterhand greift auch rohe Eier mit großem Fingerspitzengefühl
Archivmeldung vom 02.04.2012
Bitte beachten Sie, dass die Meldung den Stand der Dinge zum Zeitpunkt ihrer Veröffentlichung am 02.04.2012 wiedergibt. Eventuelle in der Zwischenzeit veränderte Sachverhalte bleiben daher unberücksichtigt.
Freigeschaltet durch Thorsten Schmitt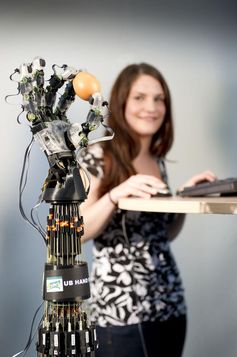
Dinge wie ein Rohes Ei zu behandeln, ist zum Synonym für Fingerspitzengefühl geworden. Ein komplexer Bewegungsapparat ist nötig, um ein Ei nicht zu zerbrechen, wenn man es in der Hand hält. Umso schwieriger ist es, auch Maschinen solches Fingerspitzengefühl beizubringen. Forschern der Universität des Saarlandes ist das jetzt zusammen mit Wissenschaftlern aus Bologna und Neapel gelungen. Sie haben eine Roboterhand entwickelt, die ein rohes Ei halten kann. Sie ist samt Antrieb nicht größer als der menschliche Arm.
Möglich macht dies ein neuartiger Schnurantrieb, bei dem kleine Elektromotoren die Schnüre verdrillen. Die Roboterhand ist dadurch kraftvoll, aber auch feinfühlig und könnte eines Tages als Helfer im Haushalt oder bei Katastrophen zum Einsatz kommen.
„Wir wollten unserer Roboterhand ein breites Spektrum an menschlichen Eigenschaften verleihen. Auf einfache und platzsparende Weise sollten ihre künstlichen Muskeln enorme Kräfte übertragen können“, erklärt Chris May, Wissenschaftler am Lehrstuhl für Antriebstechnik der Universität des Saarlandes. Die Roboterhand wurde jetzt bei einer Tagung am Forschungszentrum Informatik in Karlsruhe vorgestellt. Sie ist ein Beispiel für neue Wege, die im Rahmen des europäischen DEXMART-Projektes in der Roboterforschung beschritten wurden. Internationale Wissenschaftler hatten vier Jahre lang verschiedene Konzepte entwickelt, um vor allem zweiarmige Roboter möglichst vielseitig einsetzen zu können. Die Europäische Union hat den Forschungsverbund dafür mit 6,3 Millionen Euro gefördert.
„Wenn Roboter im Haushalt helfen oder Menschen aus brennenden Häusern retten sollen, benötigen sie Hände, die kraftvoll und zugleich behutsam zupacken“, erklärt Hartmut Janocha, Professor für Prozessautomatisierung an der Universität des Saarlandes. Die Herausforderung bestehe darin, die erforderliche Technik möglichst im Roboterarm verschwinden zu lassen, wobei sich dieser in Größe und Umfang nicht wesentlich vom menschlichen Arm unterscheide. „Wir kamen dabei auf eine einfache, aber äußerst wirksame Idee: Über Schnüre, die von kleinen, schnell drehenden Elektromotoren verdrillt werden, können wir auf kleinstem Raum sehr hohe Zugkräfte erzeugen“, erläutert Mechatronik-Forscher May. Die über Sensoren geregelte Roboterhand könne dadurch vielfältige Gegenstände ertasten, sie greifen und anheben und an anderer Stelle wieder behutsam ablegen. Chris May demonstrierte dies in Karlsruhe am Beispiel von zerbrechlichen Ostereiern und schweren Glasflaschen.
Polymerschnüre, die enorm belastbar sind, geben den Saarbrücker Forschern die Möglichkeit, mit einem kleinen Elektromotor und einer Schnur von 20 Zentimetern Länge eine Last von fünf Kilogramm in Sekundenschnelle um 30 Millimeter anzuheben. „Jeder Roboterfinger, der wie beim Menschen in drei Glieder unterteilt ist, kann mit den einzelnen Seilzügen sehr feinfühlig gesteuert werden“, beschreibt Chris May den neuartigen Miniaturantrieb. Die winzigen Elektromotoren laufen mit hoher Drehzahl und kleinem Drehmoment von etwa fünf Newtonmillimetern. „Die Roboterhand ist dadurch so nah an menschlichen Fähigkeiten, dass die Vorstellung, sie als persönlichen Assistenten im Haushalt, im Operationssaal oder auch bei industriellen Anwendungen einzusetzen, immer näher rückt. Wir gehen außerdem davon aus, dass diese Verknüpfung von Miniaturmotoren mit verdrillten Schnüren auch für andere Anwendungen interessant sind“, meint der Forscher.
Mit Themen der Antriebstechnik, Sensorik sowie der künstlichen Intelligenz von Robotern haben sich weitere Forscherteams im Rahmen des DEXMART-Projektes beschäftigt. An dem von der Europäischen Union geförderten Forschungsverbund waren insgesamt acht Universitäten und Forschungsinstitute in Deutschland, Frankreich, Italien und Großbritannien beteiligt.
Quelle: Universität des Saarlandes (idw)




