Neuer Robo-Finger ähnelt menschlichem Vorbild
Archivmeldung vom 13.10.2015
Bitte beachten Sie, dass die Meldung den Stand der Dinge zum Zeitpunkt ihrer Veröffentlichung am 13.10.2015 wiedergibt. Eventuelle in der Zwischenzeit veränderte Sachverhalte bleiben daher unberücksichtigt.
Freigeschaltet durch Thorsten Schmitt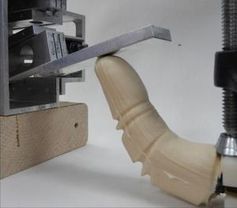
Forscher haben einen Roboter-Finger entwickelt, der dem biologischen Vorbild stark ähnlich sieht und ihm auch funktionell sehr nahe kommt. "Wir konnten unseren robotischen Finger thermomechanisch trainieren, um die Bewegungen eines menschlichen Fingers wie Beugung und Streckung nachzuahmen", sagt Erik Engeberg, Leiter des BioRobotics Lab an der Florida Atlantic University. Ermöglicht hat das eine Konstruktion mithilfe einer Formgedächtnis-Legierung. Der Finger könnte beispielsweise für realistischere Prothesen interessant sein.
Mithilfe eines 3D-Modells und des 3D-Drucks haben die Forscher einen Roboter-Finger gebaut, der von außen Ähnlichkeit mit dem gelenkigen Vorbild hat. Um ihn zu bewegen, kommt ein elektrischer Heizprozess zum Einsatz. Denn die Formgedächtnislegierung reagiert auf Wärme. Das Ergebnis ist ein Finger, der Engeberg zufolge großes Potenzial hat. "Aufgrund seines leichten Gewichts, Geschicklichkeit und Stärke bietet unser robotisches Design gewaltige Vorteile gegenüber traditionellen Mechanismen." Damit könne das Design beispielsweise in der Prothetik punkten.
Die Forscher haben ein 3D-CAD-Modell eines Fingers genutzt, um per 3D-Druck das Grundgerüst für ihren Finger zu fertigen. Im inneren stecken zwei thermomechanische Aktuatoren. Einer nimmt dank Formgedächtnis eine gerade Form an, wenn er erhitzt wird, dient also als Strecker. Der andere dagegen beugt sich beim Erwärmen. Um die Aktuatoren gezielt zu erwärmen, macht sich das Team die Wärmeentwicklung in elektrischen Widerständen zunutze. Damit die Aktuatoren einigermaßen zügig ihre Ausgangsform wieder annehmen, ist zudem eine Kühlung nötig. Eben das ist eine wesentliche Herausforderung.
Unterwasser-Robotik im Blick
Selbst mit Luftkühlung dauert es eine Weile, bis die Aktuatoren wieder in ihre ursprüngliche Form zurückkehren. "Um diese Herausforderung zu bewältigen, haben wir uns mit der Idee befasst, die Technologie für Unterwasser-Robotik zu nutzen", so Engeberg. Denn da kühlt die Umgebung naturgemäß schnell. Tatsächlich hat sich in Tests gezeigt, dass sich ein entsprechend gebauter Finger dank kühlendem Wasser sehr viel schneller bewegt. Die Technologie könnte also zunächst für den Tiefsee-Einsatz interessant sein, wo es für Menschen nicht wirklich möglich ist, ihre eigenen geschickten Hände zu nutzen.
Quelle: www.pressetext.com/Thomas Pichler