
Robo-Hand erreicht menschliche Geschicklichkeit
Archivmeldung vom 23.02.2016
Bitte beachten Sie, dass die Meldung den Stand der Dinge zum Zeitpunkt ihrer Veröffentlichung am 23.02.2016 wiedergibt. Eventuelle in der Zwischenzeit veränderte Sachverhalte bleiben daher unberücksichtigt.
Freigeschaltet durch Thorsten Schmitt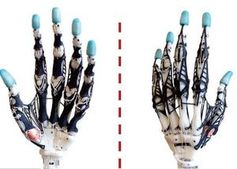
Forscher der University of Washington (UW) haben die bisher detaillierteste und menschenähnlichste Roboter-Hand entwickelt. Das Modell basiert auf den 3D-Scans des Skeletts einer menschlichen Hand und ist mittels 3D-Druck aus künstlichen Knochen hergestellt worden. Den Wissenschaftlern zufolge ist beim Festhalten eines Objektes ein eigenhändiges Bearbeiten möglich, ohne dass dafür ein taktiles Feedback notwendig ist.
Die beiden UW-Forscher Zhe Xu und Emanuel Todorov stecken hinter dem biomimetischen Design, das künstliche Gelenke sowie Gelenkkapseln inkludiert. Angetrieben werden die Museln der Prothese durch Dynamixel und Servomotoren. Ältere anthropomorphische Modelle nutzten bisher Scharniere, um den natürlichen Aufbau einer Menschenhand zu vereinfachen. Dies führte zu mangelhafter Feinmotorik, durch welche das benötigte Level an menschlicher Geschicklichkeit nicht erreicht werden konnte.
In einer menschlichen Hand dienen Bänder dazu, die Gelenke zu stabilisieren und ihre Bewegungsreichweite zu kontrollieren. Diese wurden im aktuellen Projekt durch starke Spectra-Fasern nachgebildet. Das Material ist extrem leicht und etwa 15 Mal stärker als Stahl. Durch Laserschnitt erzeugte Gummistücke wurden eingesetzt, um das weiche Gewebe zu reproduzieren. Auch Sehnen sind mithilfe von Spektrafasern und Gummi nachgeahmt worden, damit die Finger flexibel sind. Die Eingaben erfolgen über einen Handschuh-Controller.
Quelle: www.pressetext.com/Carolina Schmolmüller





