
Suche nach Leben auf Jupiters Eismond durch autonomes Roboterduo
Archivmeldung vom 12.12.2012
Bitte beachten Sie, dass die Meldung den Stand der Dinge zum Zeitpunkt ihrer Veröffentlichung am 12.12.2012 wiedergibt. Eventuelle in der Zwischenzeit veränderte Sachverhalte bleiben daher unberücksichtigt.
Freigeschaltet durch Thorsten Schmitt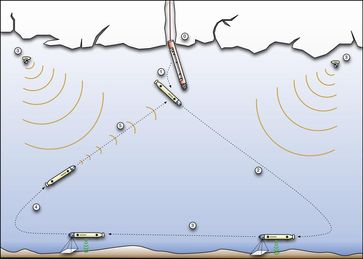
Auf dem Eismond „Europa“ wird unter einer bis zu 10.000 Meter dicken Eisdecke ein Ozean aus Salzwasser vermutet. Stimmt das, könnte es dort Formen von Leben geben. Ein intelligentes Navigationssystem soll einem autonomen Unterwasserfahrzeug (AUV) ermöglichen, diesen Ozean erstmals zu erkunden; getragen im Bauch eines mobilen Bohrers, der das zylindrische AUV durch die Eisschicht ins Wasser bringt. Wissenschaftler des Robotics Innovation Center am Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) in Bremen entwickeln die Algorithmen für das Roboterduo und testen es auf der Erde.

Das Projekt „Europa-Explorer“ wird mit rund 1,5 Millionen Euro vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) über drei Jahre gefördert. Ziel des Teams um Prof. Dr. Frank Kirchner ist es, zu zeigen, dass Roboterteams den in Jupiters Schatten liegenden Eismond autonom erkunden können. Nachweisen soll das eine sogenannte Analogmission auf irdischem Boden.
„Unsere Algorithmen werden auf dem AUV und dem Eisbohrer unter möglichst realistischen Bedingungen getestet. Denkbar sind Abschlussversuche am Polarkreis“, sagt Projektleiter Marc Hildebrandt. Das Göttinger Max-Planck-Institut für Sonnensystemforschung liefert Daten zu Temperatur, Gravitation, Strömung und der Geräuschkulisse, die auf „Europa“ und in seinem Ozean herrschen. Mutmaßlich befinden sich dort in rund 100 Kilometern Wassertiefe Hydrothermalquellen. Durch das Spenden von Wärme und Mineralien ermöglichen diese selbst an dunklen, kalten Orten Leben. Hier siedeln sich naturgemäß Biosysteme an. Um diese aufzustöbern, muss ein Unterwasserfahrzeug den Grund des Meeres erreichen.
Im Fokus der DFKI-Forschungsarbeiten steht die Navigationsfähigkeit des AUV: Nach seinem Tauchgang soll es eigenständig zurück zum Eisbohrer finden, um die gesammelten Informationen wie Fotos und Messdaten über eine Schnittstelle an den Eisbohrer und weiter zur Erde zu übermitteln. Das Roboterduo muss während der gesamten Mission ohne Steuerung von der Erde auskommen. Denn ein von der Welt gesendetes Signal kommt mit 33 bis 53 Minuten Zeitverzögerung an – zu lang, um spontan auf neue Situationen reagieren zu können.
Autonomes Unterwasserfahrzeug Dagon als Entwicklungsgrundlage
Als Grundlage dient den Forschern das am DFKI entwickelte AUV Dagon. Das gut ein Meter lange und 75 Kilo schwere AUV kann sich präzise selbst lokalisieren und visuelle Landkarten erstellen. Eingebaute Sensoren senden Schallsignale aus, über die das Fahrzeug seine Position ähnlich der GPS-Methode bestimmen kann. Mit seinen zwei Kameras im Kopf nimmt Dagon während der Fahrt Bilder der Unterwasserlandschaft auf. Anhand seines Abstands und Blickwinkels auf einen bestimmten Punkt errechnet das System seine Position. Dagon wurde bereits erfolgreich in der Industrie eingesetzt, z.B. um Kühlrohre von Kohlekraftwerken zu inspizieren. Das neue AUV wird erheblich kompakter und damit eines der schmalsten existierenden UW-Fahrzeuge sein, um in den Eisbohrer zu passen. Neben der Navigationsleistung wird auch das Antriebskonzept verbessert: Wie klassische AUVs wird es eine Schraube zur aktiven Fortbewegung haben, zugleich aber auch wie sogenannte Glider durch Auftriebsänderung durch das Wasser gleiten können. Mit diesem hybriden Antriebssystem kann das AUV weite Strecken energieeffizient zurücklegen.
Europa-Explorer wird gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Technologie aufgrund eines Beschlusses des Deutschen Bundestages. Förderkennzeichen: 50 NA 1217
Quelle: Deutsches Forschungszentrum für Künstliche Intelligenz GmbH, DFKI (idw)




