
Das Smartphone als Quadcopter-Pilot
Archivmeldung vom 19.08.2013
Bitte beachten Sie, dass die Meldung den Stand der Dinge zum Zeitpunkt ihrer Veröffentlichung am 19.08.2013 wiedergibt. Eventuelle in der Zwischenzeit veränderte Sachverhalte bleiben daher unberücksichtigt.
Freigeschaltet durch Thorsten Schmitt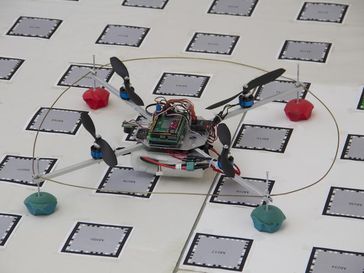
Ein Quadcopter, der sich völlig autonom im Raum zurechtfinden kann wurde an der TU Wien entwickelt. Er kommt während des Fluges ohne menschliche Steuerungs-Eingriffe aus und muss im Gegensatz zu anderen Modellen auch nicht auf die Rechenpower eines am Boden stehenden Computers zurückgreifen. Die gesamte notwendige Rechenleistung ist mit an Bord – in Form eines handelsüblichen Smartphones.
Quadcopter sind in den letzten Jahren weltweit zu einem beliebten Spielzeug für die Forschung geworden. Die kleinen viermotorigen Fluggeräte eignen sich nicht nur hervorragend, um wissenschaftliche Ideen aus der Regelungstechnik auszuprobieren, damit sie sicher und stabil fliegen. Mit ihnen wird auch untersucht, wie Maschinen am besten ihre Umwelt wahrnehmen und autonom agieren können.
Das Virtual-Reality-Team der TU Wien beschäftigt sich seit Jahren mit dem digitalen Erfassen visueller Daten. „Es war für uns also eigentlich ein logischer Schritt, uns in Richtung Robotik weiterzuentwickeln und mal eine Kamera auf einen Quadcopter zu packen“, sagt Hannes Kaufmann vom Institut für Softwaretechnik und Interaktive Systeme der TU Wien. Normalerweise werden Quadcopter von Menschen gesteuert oder sie funken ihre Daten an einen leistungsfähigen Rechner am Boden, der dann die nötigen Steuersignale zurückgibt. Der TU-Quadkopter ist hingegen völlig eigenständig.
Ein Smartphone als Auge und Gehirn
Ganz bewusst entschied man sich, kein teures vorgefertigtes Quadcopter-System zu kaufen, sondern aus sorgfältig ausgewählten Einzelteilen ein möglichst simples, kostengünstiges Gerät herzustellen. Das Herzstück – und der teuerste Bestandteil des TU-Quadcopters – ist ein Smartphone. Es liefert über die Kamera die nötigen Bilder und dient gleichzeitig als Steuerzentrale. Die ganze Intelligenz des Quadcopters, die ihm die Orientierung im Raum ermöglicht, konnte in eine Smartphone-App gepackt werden. Zusätzlich sorgt ein Micro-Controller für die Feinabstimmung der Rotor-Bewegung, sodass der Quadcopter stabil fliegt.
Der Quadcopter sollte Indoor-tauglich sein und selbst in kleinen Räumen gut funktionieren. Für die Steuerung ist das eine große Herausforderung, weil gerade an Wänden oder in Ecken die Aerodynamik ganz anders sein kann als im freien Raum. Außerdem musste aufgrund dieser Anforderung auf die Verwendung von GPS verzichtet werden – der Quadcopter muss sich ausschließlich durch visuelle Daten orientieren.
Um die Orientierungsfähigkeit des Quadcopters zu testen, brachte das TU-Team visuelle Codes am Boden an, die ähnlich wie QR-Codes funktionieren. Im Darüberfliegen erkennt der Quadcopter die Codes, sammelt Information und erzeugt so nach und nach eine virtuelle Landkarte seiner Umgebung. Hat er sich erst mal orientiert, kann er ganz gezielt bestimmte Orte ansteuern oder sich zu Regionen der Landkarte bewegen, die er noch nicht so gut kennt.
„Das Ziel ist, dass sich der Quadcopter in Zukunft dann auch ohne diese Codes auskommt und sich anhand von natürlich vorkommenden Orientierungspunkten, die aus den Kameradaten und auch von Tiefensensoren wie der MS Kinect gewonnen werden sollen, in der Umgebung zurechtfindet“, sagt Annette Mossel, die Chefdesignerin des Quadcopters. Sie entwickelte das Gerät gemeinsam mit den Diplomanden Christoph Kaltenriner und Michael Leichtfried.
Der Quadcopter als Allzweck-Bilderlieferant
Anwendungsideen für einen autonomen Quadcopter gibt es viele: Feuerwehrleute könnten ihn in ein brennendes Gebäude vorausschicken und sich ein 3D-Bild der Umgebung senden lassen, bevor sie sich selbst hineinwagen. Mini-Quadcopter könnten in großen, unübersichtlichen Gebäuden Menschen an die richtige Stelle leiten. Durch seine geringen Kosten könnte ein solcher Smartphone-Quadcopter auch für weniger wohlhabende Regionen der Erde interessant sein: Er könnte etwa Auskunft über Waldrodungen geben, ohne dass teure Geräte oder Helikopter-Überflüge notwendig sind.
Die Bauteile des TU-Quadkopters haben einschließlich Smartphone weniger als tausend Euro gekostet, rechnet das Team vor. Die monatelange Arbeitszeit, die in die Entwicklung von Elektronik und Computerprogrammen investiert wurde, ist in dieser Rechnung freilich nicht einberechnet.
Quelle: Technische Universität Wien (idw)




